Revision 2 (zum Start beim Bockbierfest in Herbsthausen am 5.5.2005)
Vorabinfo: Diesmal hat fast alles nach Plan funktioniert
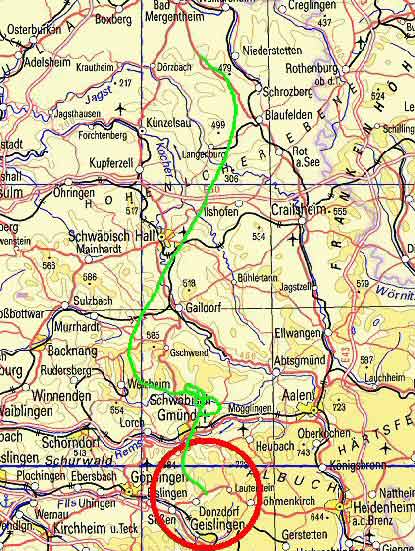
Route des Fluges des P56 SSTV-Ballons II am 5.5.05
| Fluginfo | |||
| Flugdatum: | 05.05.2005 | ||
| Flugzeit MESZ: | 14:44 Uhr - 19:22 Uhr (4std 38min) | ||
| Maximale Flughöhe: | 29475 m um 18:36 Uhr | ||
| Startkoordinaten: | 49,406°N 9,826°O | ||
| Berstpunkt: | 48,879°N 9,799°O | ||
| Landekoordinaten: | 48,704°N 9,833°O | ||
| Technische Daten | |||
| Sendefrequenz 2m: | 145.200 MHz | ||
| Sendefrequenz 70cm: | 433.400 MHz | ||
| Peilsender 70cm (autark): | 433.940 MHz | ||
| Sendemodi: | APRS, PR, SSTV (Martin2), CW (Peilsender) | ||
| Gewicht des Ballons: | 800g | ||
| Gewicht des Fallschirms: | 60g | ||
| Gewicht des Radarreflektors: | 150g | ||
| Gewicht der Nutzlast: | 1160g | ||
| Gewicht des Modelseglers: | 200g | ||
| Sensoren: | Temperatur außen, innen 4x (1 x je Batteriepack) | ||
| Spannung 4 x, 1 x je Batteriepack, 1 x gesamt | |||
| Strom 4 x, 1 x je Batteriepack, 1 x gesamt | |||
| Feuchte | |||
| Luftdruck | |||
| Geiger-Müller-Zählrohr | |||
| Beschleunigung 2g in X- und Y-Richtung | |||
| Beschleunigung 50g in Z-Richtung | |||
| Kamera: | 640x480-Pixel | ||
| ext. Speicher: | 128MB Compact-Flash | ||
| Projektteam | |||
| DB6TR | Kontrollstation, Simulation, Ballonprojekthomepage | ||
| DC3IX | Peilteam1 (Fahrer) | ||
| DG1SJF | Peilteam2 (Beifahrer) | ||
| DG7SEF | Peilteam1 (Beifahrer) | ||
| DG7SFL | 70cm-TRX, Controllstation | ||
| DL2SEK | Schaltplan, Layouts, Lochraster | ||
| DL4AAS | Schaltplan Software | ||
| DL4SDR | Peilteam2 (Fahrer) | ||
| DL4SJ | Aufbau, Logistik | ||
| DO5STD | Internetanbindung, Livestream, P56 Homepage | ||
| weitere OV-Mitglieder P56 | tatkräftige Unterstützung bei Organisation, Aufbau etc. |
Alle geloggten Sensordaten des Fluges kann man hier in einer Excel-Tabelle herunterladen.
Hier findet man eine Übersicht der Stationen, die den Ballon empfangen haben mit Position (Mapblastkarte) und Mudus. Dabei bedeutet SV (SSTV), EL (Echolink), PR (Packet Radio), AP (APRS), PH (Phonie), LS (Live Stream) und CH (Live-Chat). (wird noch vervollständigt)
 Bild1 Bild1 |
HARDWARE Ursprünglich sollte die neue Hardware, bei der wir besonders Wert darauf legten, dass die Bauteile von jedermann ohne große Probleme zu beschaffen sind, schon Ende 2004 fertig sein. Diesen Vorsatz, lang genug Zeit zu haben und alles ordentlich auszutesten, konnten wir aber leider mal wieder nicht erfüllen. So waren die Schaltpläne Schaltpläne ca. 5 Wochen vor den Starttermin, die Layouts und dementsprechend die Gerberdaten gerade mal 4 Wochen vor dem Start verfügbar. Wir wussten also, dass es wieder sehr knapp mit der Inbetriebnahme wird, sollten wir die Leiterplatten noch rechtzeitig bekommen. Knapp eine Woche vor dem Starttermin, als uns die kommerzielle Lösung zu unsicher erschien, entschieden wir uns, den Schaltplan so weit wie möglich auf Lochraster nachzubilden. Die Ästhetik würde hier natürlich zu kurz kommen. Nach kurzer Absprache einigte ich mich mit Jens auf einen Sandwichaufbau, der in der untersten Lage (8cm x 10cm) das bekannte EVA-Board im Einsatz hatte. Die mittlere Lage bestand aus einer Eurokarte (16cm x 10cm) welche so auch genug Platz hatte den 70cm-TRX komplett steckbar anzubringen und die die ganzen Sensoren, Sensoranschlüsse, Batteriestecker mit Zusammenschaltung der Batteriepacks, Kamerainterface, PTT-Steuerung sowie Chipselect-Multiplexing beinhaltete. Dieser Aufbau ist nochmals besser in Bild1-Bild3 zu erkennen. Die oberste Lage war wieder eine halbe Eurokarte mit Erweiterungspeicher, CF-Adaptierung und NF-Verstärkung, wie schon bei REV1 eingesetzt. Diesen Aufbau konnte ich dann nach einigen Nachtschichten auch mit ausreichend Zeitpuffer (ca. 2 Tage :-) ) fertigstellen, sodass wir noch genug Zeit für Inbetriebnahme, Fehlersuche, Anpassung des Gehäuses etc. hatten. Parallel hierzu baute ich mit etwas Unterstützung von Martin dann noch die kleinen Sensorplatinchen auf Lochraster auf, die 2D-Beschleunigungssensoren, Batteriesensoren Temperatur- und Feuchtesensoren etc. enthielten. Die Batteriesensorenplatinen, die im Wesentlichen aus dem Mess-IC sowie sehr wenig Außenbeschaltung bestehen, sind in der Lage dem µC über einen 1 Wire-Bus Informationen über Batteriespannung, Batteriestrom, sowie die aktuelle Temperatur eines jeden der drei Batteriepacks zu übermitteln. Die Beschleunigungssensoren der Typen ADXL202 wurden eingesetzt um uns Informationen über die Beschleunigungen in X- und Y-Richtung zu geben. Dies ist uns, wie man in der Excell-Auswertung sehr schön erkennen kann, auch gut gelungen. Wie wir vermutet hatten waren die Beschleunigungen während des Steigfluges nicht zu hoch. Jedoch direkt nach dem Platzen des Ballons in min. 29.475m und bei sehr wenig Luftdruck (ca. 10hPa) kam die Nutzlast ins Taumeln. Da die Luft hier noch sehr dünn ist wirkt auch der Fallschirm (Bild6) noch nicht so gut. Dementsprechend ist auch der Auswertung zu entnehmen, dass die Fallgeschwindigkeit des Ballons erst bei dickerwerdender Luft niedriger wird. Der Absolutdrucksensor des Typs MPXM2102A lieferte optimale Werte (Bild7), wie auch der Vergleich mit einem Diagramm des DWD zeigte. Leider hatten wir bei der Kalibrierung aber keinerlei Möglichkeiten Unterdrücke zu messen und entsprechend einzustellen. Daher hatten wir kleine Abweichungen im Offset und der Verstärkung des A/D-gewandelten Differentialsignals, sodass wir ab einer bestimmten Höhe einen negativen Druck ausgaben. Die Temperatursensoren im Inneren der Ballonbox (Bild4) lieferten sehr gute Werte. Leider hatten wir bei der Messung mit dem Aussentemperatursensor einige Grundlagen einfach außer Acht gelassen. So wurde der Sensor, der in einem schwarzen TO92-Gehäuse untergebracht ist nicht ausreichend mit der dünnen Luft umwirbelt. Bei kommerziellen Wettersonden ist der Temperatursenor ein metallisches, nicht wäremabsorbierendes Bauteil, das ausreichend umströmt werden kann. Hier hatten wir im Bereich beim Aufstieg, in dem Temperaturen zwischen zwischen –40°C und –56°C herrschen auf einmal positive Messwerte. Hier hat uns leider, wie oben schon angedeutet die Sonne einen Streich gespielt und unseren Sensor zu stark aufgeheizt. Im Stürz, als der Sensor durch den „Fallwind“ schön umströmt wurde normalisierten sich die Werte und entsprachen etwa dem Erwarteten. Der 70cm Peilsender hätte seinen Zweck wohl voll erfüllt, wenn er denn nur gebraucht worden wäre. Mit seinen max. 10mW und der Schleifenantenne wurde er von unserem Peilteam sogar in 22km Höhe gehört, obwohl hier die beiden leistungsstärkeren Sender auf 2m und 70cm aufgrund der Abstrahlung durch die eingesetzten Antennen nicht mehr hörbar waren. Der Sender wurde für den Notfall mitgeschickt und ist mit einer autarken Versorgungsspannung von 6V verbunden, die ca. 24 Stunden überdauern kann. Somit sollte nach der Landung genug Zeit sein, bei einem Totalausfall des restlichen Systems den Ballon zu bergen. Der 70cm Sender ist eine Entwicklung von Michael (DG7SFL). Infos hierzu werden bald nachfolgen. Der 2m Sender hat sich bislang bei schon sehr vielen Ballonmissionen bewährt und wurde von DK5UG entwickelt. Je nach Versorgungsspannung hat er bis zu 200mW Sendeleistung. Die beiden Antennen für 2m und 70cm wurden jeweils als Koax-Sperrtopf ausgeführt. Im Nachhinein betrachtet sind wir mit den Abstrahlungscharakteristika der Antennen aber nicht zufrieden. An unserer Kontrollstation hatten wir teilweise sehr starke Signaleinbrüche, was wir auf die Antennenformen und somit auf die Strahlungsdiagramme zurückführten. Klar wurde, dass die Antennen an der Bodenstation verbessert werden müssen. Aber auch am Ballon selbst wollen wir noch etwas experimentieren. Problemlos hat auch wie beim ersten Ballonstart die Tochternutzlast in Form eine ca. 200g schweren Modellseglers geklappt. Der "Chefpilot" Philipp Gura vom MSC-Röttingen hat den Segler schon wie im Vorjahr bei etwa 300m-400m vom Ballon abgekoppelt. Nach kurzem Rückwärtsfall hat das Model eine stabile Fluglage eingenommen und konnte mit seiner Live-Cam auf 23cm Bilder vom Festgelände zum Boden übertragen. Nach wenigen Minuten ist er dann wie geplant am Rande des Festplatzes gelandet. SOFTWARE Software, bzw. Firmware ist ja so ganz und garnicht meine Sache. Jens (DL4AAS) hat hier aber in langer enthaltsamer Arbeit Großes geleistet. Die ganze Ablaufsteuerung, bearbeiten und einblenden von Diagrammen, Flugrouten etc... . Beschreiben soll er das aber am besten selbst. Hier kommt man auf seine Seite. FLUGROUTENVORHERSAGE Die Flugroutenvorhersage für Ballons haben wir ca. eine Woche im Voraus getestet und die Bedingungen beobachtet. Dabei haben wir die Flugrouten für unterschiedliche Berstpunkthöhen überlagert und die Abweichungen der Landepunkte verglichen. Je nach Vorhersage der Höhenwinde haben sich hierbei teilweise bei Berstpunkthöhen zwischen 25km und 35km nur Differenzen bis zu 3km in der Horizontalen ergeben. Für den Starttag, bzw. auch am Starttag haben wir Vorhersagen für Berstpunkthöhen zwischen 20km und 34km gemacht. Diese Vorhersagen treffen sehr gut auf "Standardwetterballons", die jeden Tag mehrfach von Wetterdiensten gestartet werden zu. Da unser Ballon aber nicht den gleichen Auftrieb und auch ein etwas anderes Sinkverhalten hat, mussten wir mit Abweichungen rechnen. Dass unser Ballon aber so wenig Auftrieb hatte, hatten wir nicht erwartet und in unseren Auftriebs-Tests direkt vor dem Start mit PET-Flaschen nicht erkannt. Der Ballon stieg nach dem Start sehr langsam was natürlich auch durch das mitgeführte Segelflugzeug mit etwa 200g Masse zu erklären war. Nachdem wir aber dieses Flugzeug abgeworfen hatten, wurde die Steiggeschwindigkeit des Ballons aber auch nicht viel größer. So hatten wir nach der ersten Stunde Flug eine Höhe von 6000m. Geplant war zu dieser Zeit schon eine Höhe von ca. 15km. Schnell wurden Stimmen laut, dass der Ballon ca. 5 Stunden fliegen könne und in dieser Zeit problemlos bis Österreich kommen kann. Das hat sich dann aber zu Glück nicht bestätigt. Trotzdem arbeiteten wir ständig neue Vorhersagen aus und versuchten unsere beiden Peilteams recht nah am Ball(on) zu halten. Kaum hatten wir uns damit angefreundet, dass der Ballon den Funkamateuren auf diese Weise länger Freude bereitet, haben wir mir Schrecken festgestellt, dass wir von einem der 3 mitgeführten Batteriepacks keine Daten mehr bekommen. Die anderen beiden sind verdächtig stark bei der Spannungsmessung eingebrochen. Mussten wir nun über die Fernsteuerung doch schon während des Fluges in den Stromsparmodus schalten? Eigentlich sollte dieser Modus erst am Boden aktiviert werden, um den Peilteams genug Puffer einzuräumen die Nutzlast zu bergen. Da wir aber nicht mit einer dermaßen langen Flugzeit gerechnet hatten, spielten wir nun mit dem Gedanken die Sendehäufigkeit stark einzuschränken. Nach einiger Zeit erholten sich die Batteriepacks wieder, bzw. die Spannung brach nicht weiter ein, was bei den Umgebungstemperaturen für diese Zellen auch laut Datenblatt so spezifiziert ist. Leider ist uns das bei dem Studium der Datenblätter nicht aufgefallen oder war auch nicht mehr im Gedächtnis, sodass wir doch zeitweise etwas hecktisch wurden. Als dann aber klar war, dass die Batterien noch Stunden reichen sollten, ließen wir den Ballon im aktuellen Sendemodus seinen Flug beenden. Die nachträgliche Auswertung (Bild16) unserer Vorhergesagten Flugroute ergab folgendes: Der Steigflug ging aus Vorhersagesicht ordentlich in die Hose. Während der Ballon aber flog haben wir beschlossen die vorhergesagte Richtung und Entfernung die der Ballon ab dem Berstpunkt zurücklegen sollte an den tatsächlichen Berstpunkt anzusetzen und dann unsere Peilteams in das Zielgebiet zu lenken. Um diese Vorhersage recht exakt zu treffen, mussten wir natürlich die Sinkroute für die entsprechende Bersthöhe ansetzen. Da wir uns aber vorhersagetechnisch auf Bersthöhen zwischen 20km und 34km vorbereitet hatten, bzw. die Vorhersagen sogar noch online aktualisieren konnten hofften wir recht genau zu werden. So haben wir nun im Nachhinein betrachtet eine Abweichung von 6,2km vom tatsächlichen Landeort gehabt. Meiner Meinung nach kann man mit so einer Genauigkeit leben. Sehr interessant war aber auch der Bericht unserer beiden P56-Peilteams. Beide hatten während des Fluges optischen Kontakt mit dem Ballon. So konnte Team 2 den Ballon auf Höhe der BAB A6 den Ballon in etwa 6km Höhe mit den Fernglas sehen. Team 1 hat ihn etwas südlicher sogar nochmals in knapp über 8km Höhe gesehen. Bergungsbericht von Herbert (DL4SDR) "Bergung Ballon-DB0TTM am 05.05.2005 – Bericht von DL4SDR Nachdem der Ballon geplatzt war und entsprechend der Prognose der Abstiegsrichtung entschieden wir, dass wir unsere Fahrtroute so gestalten, dass der Ballon zwischen den Verfolgern „bleibt.“ Die Strassenverbindung zum vermuteten Landepunkt war nicht unbedingt Gut. Um 19.12 empfing das Team DL4SDR/DG1SJF zuletzt GPS-Daten des Ballons aus 800 Meter Höhe. Jan vermutete den Landeort bei einer Erhöhung südlich von Winzingen. Diese Vermutung wurde bestätigt durch die Prognose der Leitstation in Herbsthausen. Da keine direkte Strassenverbindung bestand, mussten wir einen Umweg von ca. 10 Km nehmen. Ca. 5 Km vor dem vermuteten Landeort empfingen wir aktuelle Positionsdaten. In dem Kleinen Ort Hagenbuch fanden wir einen Feldweg, der uns unmittelbar zum Landeort führen sollte. Ein befestigter, nasser und teilweise matschiger Wirtschaftsweg musste befahren werden. Wir hielten 90 Grad vom Landeplatz an. Dann mussten wir uns erst mal anderes Schuhwerk anziehen um 200 Meter Wiesenhang mit teilweise 12% Steigung hinaufzuklettern. Das Gras der Wiese war teilweise Kniehoch und sofort waren wir nass bis zu den Oberschenkeln. J Am Waldrand angekommen sahen wir bereits die Stuttgarter Gruppe, die wenige Minuten zuvor aus nördlicher Richtung „angegriffen“ hatte. Die 2. Verfolgercrew (DC3IX/DG7SEF), die einen längeren Anfahrtsweg hatte, wurde zwischenzeitlich zum Landeplatz gelotst. Der Ballon war in ca. 14 Meter Höhe am Rande einer Waldlichtung in den Bäumen (Bild17) „gelandet“. Eile war geboten, da die Sonne bereits tief am Horizont stand. Mittels eines vom Boden aufgesammelten, ca. 8 meter langen Baumrestes (Ast) versuchten wir erst mal die Nutzlast zu erreichen. Leider ohne Erfolg. DL4SDR hatte zufällig (dank Internet-Berichten anderer Ballonjäger) 2 Angeln dabei. Diese mussten vom Fahrzeug geholt werden. Nach Beratung mit den „Stuttgartern“ wurden mittels vorhandenem Gewebeband beide Angeln parallel an dem Ast-Rest befestigt. Wegen fehlender Angelschnur wurde erneut das Gewebeband eingesetzt und eine grosse Schlaufe am Ende befestigt. 3 Anläufe später gelang es den „Anglern“ die Nutzlast zu erfassen und diese auf den durchweichten Waldboden OHNE erkennbaren Schaden zu befördern. Zu diesem Zeitpunkt war die gesamte Technik noch in Betrieb. Erleichtert und zufrieden mussten dann natürlich die obligatorischen Bilder für die Nachwelt erstellt werden. Nach Öffnen und abschalten der Technik machten wir uns gegen 21:15 Uhr auf den Rückweg. Fazit: GEMEINSAM (Bild19) war es uns allen möglich, das Projekt zu einem gelungenen Ende zu bringen."
Eine grafische Auswertung der Empfangsberichte wird hier noch in nächster Zeit erscheinen.
Herzlichen Dank auch hier nochmals an alle Mitwirkenden, Helfer und Freiwilligen die nicht namentlich erwähnt wurden. Bilder der mittlerweile bestückten neuen Hardware des Revisionsstandes 2+ sind hier zu sehen. |
|
 Bild2 Bild2 |
||
 Bild3 Bild3 |
||
 Bild4 Bild4 |
||
 Bild5 Bild5 |
||
 Bild6 Bild6 |
||
 Bild7 Bild7 |
||
 Bild8 Bild8 |
||
 Bild9 Bild9 |
||
 Bild10 Bild10 |
||
 Bild11 Bild11 |
||
 Bild12 Bild12 |
||
 Bild13 Bild13 |
||
 Bild14 Bild14 |
||
 Bild15 Bild15 |
||
 Bild16 Bild16 |
||
 Bild17 Bild17 |
||
 Bild18 Bild18 |
||
 Bild19 Bild19 |
||